PID Control
카테고리 없음2023. 4. 10. 10:42
상태 제어가능성 state controllability
출력 제어가능성 output controllability
관측가능성 observability
PID 제어기기의 일반적인 특징은 다음과 같다.
- PID 제어기는 구조가 간단하고 제어 성능이 우수하며, 제어이득 조정이 비교적 쉽기 때문에, 산업현장에서 80%이상을 차지할 정도로 많이 사용되고 있다. PID 제어는 비례제어, 적분제어, 마분제어를 단독으로 사용하거나 혹은 두가지 이상을 결합한 형태로 사용한다.
- 비례(P) 제어는 PID 제어기에서 반드시 사용하는 자장 기본적인 제어이며 구현하기 쉽다. 그러나, 비례제어 만으로는 플렌트에 적분기가 없을 경우에 정상상태 오차가 발생하기 쉽다.
- 적분(I) 제어는 주로 정상상태 오차를 없애기 위해 사용된다. 그러나, 적분 이득을 잘못 조정하면 과도한 오버슈트가 발생하거나 시스템이 불안해 진다.
- 미분(D) 제어는 잘 활용하면 안정성에 기인하고, 예측 기능이 있어 응답속도를 조절 할 수 있다. 하지만 시스템ㅇ 잡음 성분이 있을 때, 미분 값이 커지게 되어 제어 입력에 나쁜 영향을 미치는 단점이 나타난다.
- PID 제어기의 계수들은 근궤적 기법, 주파수 응답기법, 분석적 방법 등을 사용하여 설계할 수 있다.
- PID 제어기에 구동기를 연결하여 사용할 때, 구동기의 포화특성이 있으면 적분누적 integrator windup 현상이 생겨 불안정하게 되는데, 이를 막기 위하여 누적 방지 anti-windup 기법을 사용하여야 한다.
- PID 제어기의 형태는 병렬형이 기본형이지만, 실재로 구현할 때에는 필요에 따라 직렬형으로 하거나 미분기 필터를 부착하는 등 여러가지로 변형되어 쓰인다.
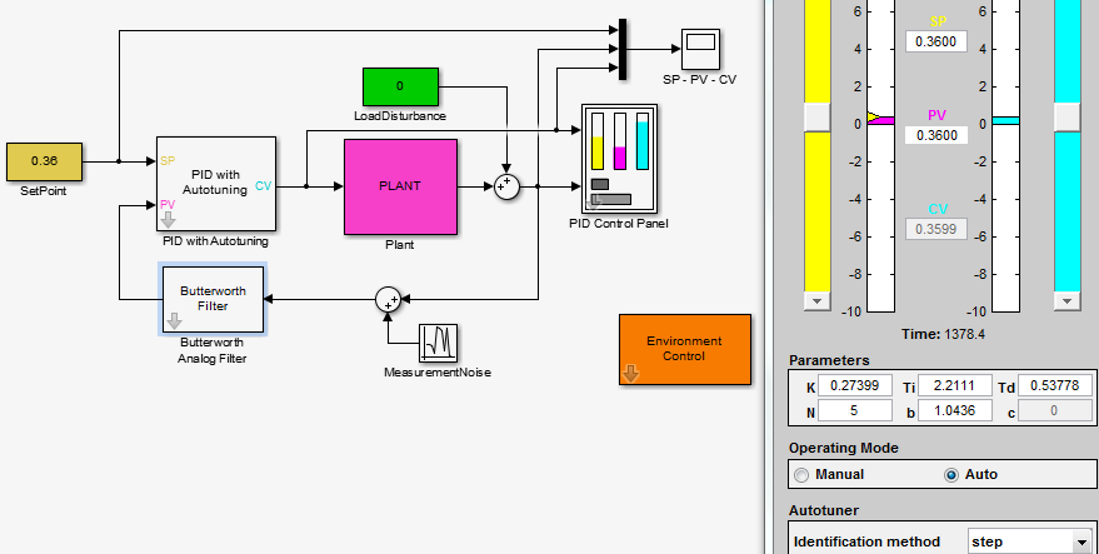
- PID 계수들을 자동적으로 조정하는 것을 auto-tunning 이라 하며, 산업계에서 많이 필요로 하고 있다. 대표적인 방법으로는 Ziegler-Nichols 동조법, Relay 동조법 등이 있으며, 이 방법들은 제어대상 시스템의 모델을 사용하지 않고 간단한 동조 과정을 거쳐 PID 계수를 결정한다.
